|
My research interest lies in robotics and computer vision, with the goal of
enabling robots to perform dextrous tasks with adaptability, generalizability
and safety.
Email: 2200012964 [at] stu.pku.edu.cn
Email / Github / CV / Google Scholar |

|
|
|
|
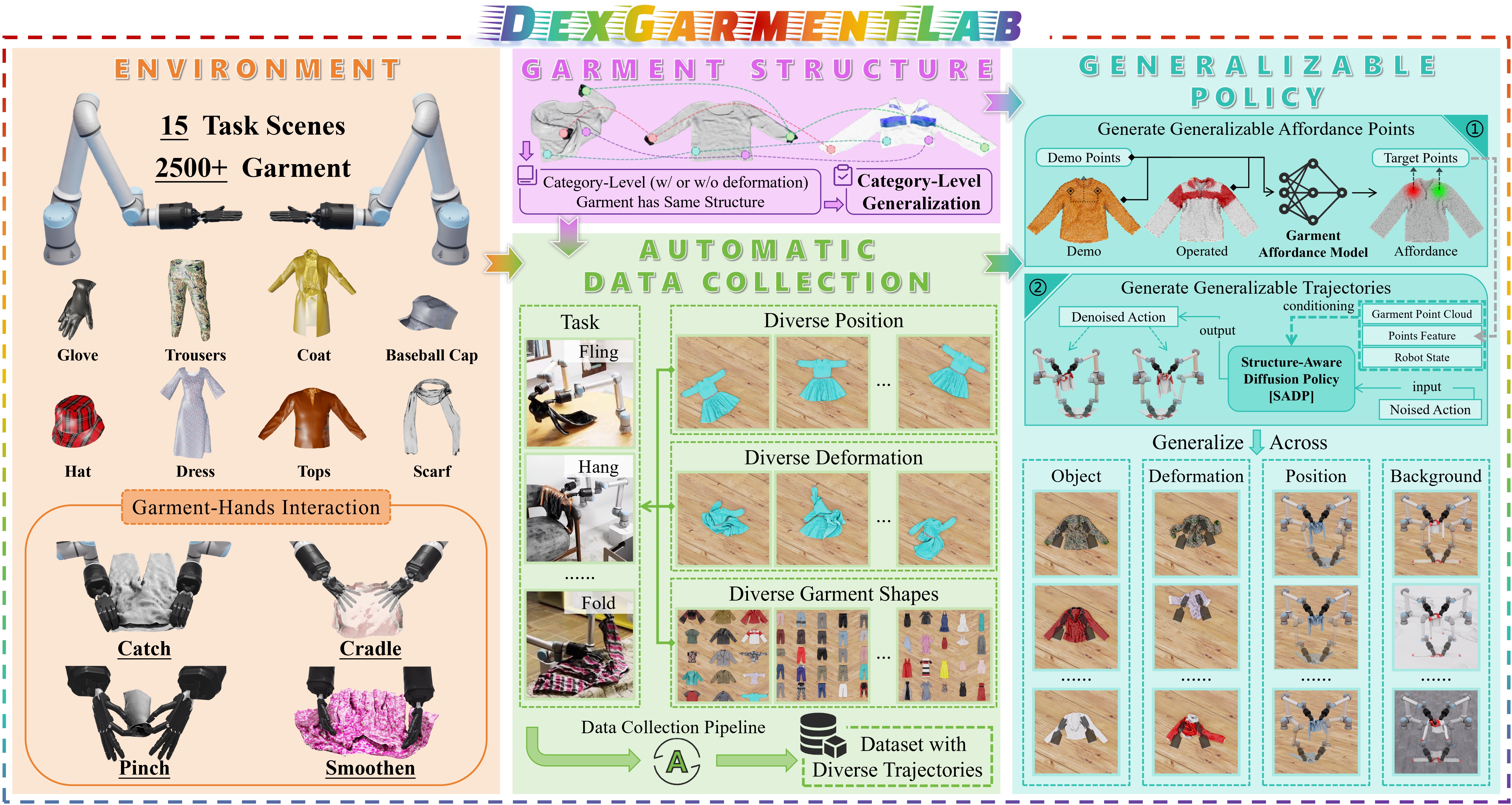
Yuran Wang*, Ruihai Wu*, Yue Chen*, Jiarui Wang Jiaqi Liang, Ziyu Zhu, Haoran Geng, Pieter Abbeel, Jitendra Malik, Hao Dong NeurIPS 2025 Spotlight project page / paper / code / data We introduce DexGarmentLab, a realistic sim environment for bimanual dexterous garment manipulation. Based on this environment, we propose a new benchmark, an efficient data collection pipeline, and a novel policy framework that uses category-level visual correspondences for few-shot garment manipulation. |
|
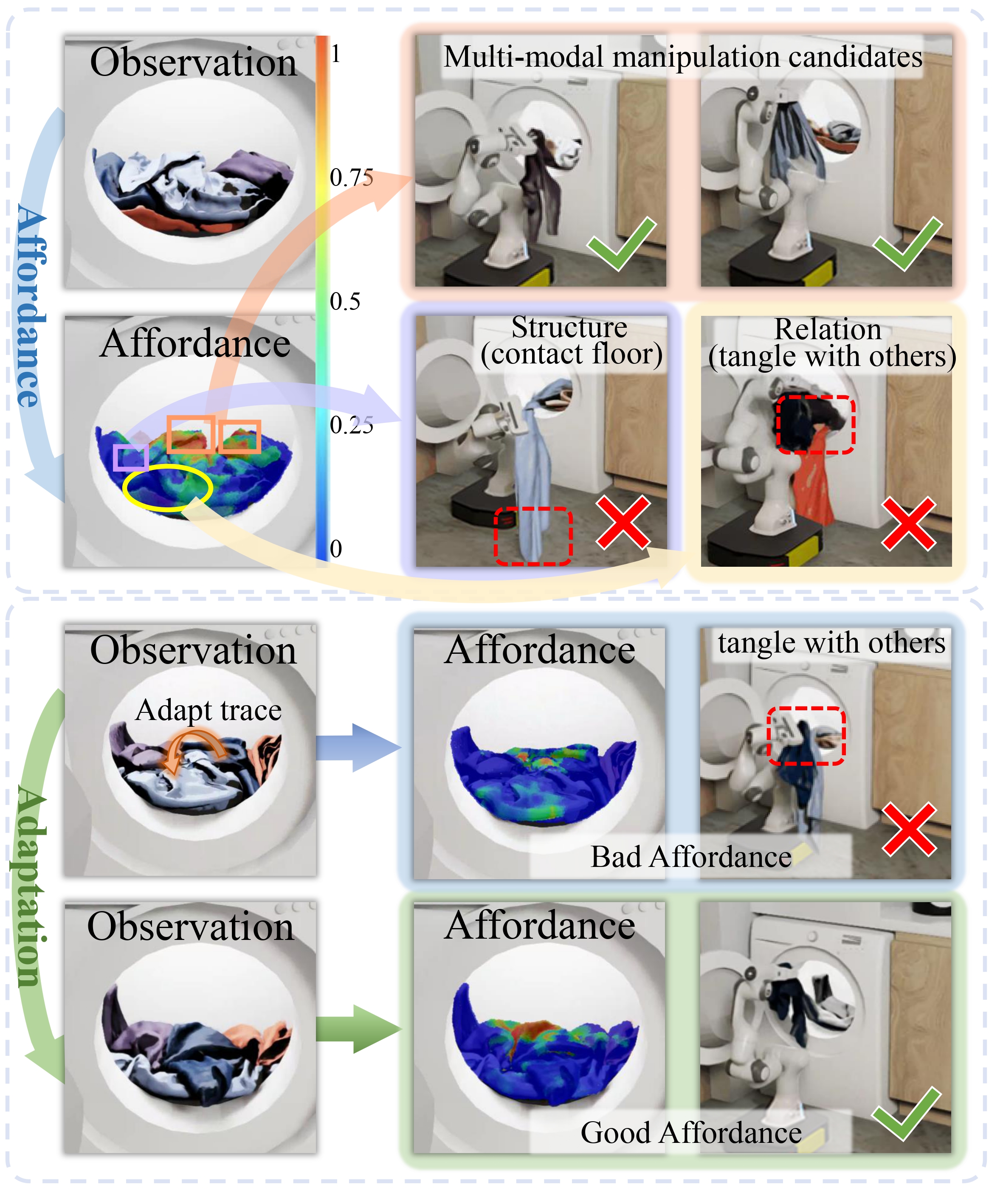
Ruihai Wu*, Ziyu Zhu*, Yuran Wang*, Yue Chen, Jiarui Wang, Hao Dong CVPR 2025 project page / paper / code / video We propose to learn point-level affordance to model the complex space and multi-modal manipulation candidates of garment piles, with novel designs for the awareness of garment geometry, structure, inter-object relations, and further adaptation. |

|
Haoran Lu*, Ruihai Wu*, Yitong Li*, Sijie Li, Ziyu Zhu, Chuanruo Ning, Yan Shen, Longzan Luo, Yuanpei Chen, Hao Dong NeurIPS 2024 Spotlight Presentation at ICRA 2024 Workshop on Deformable Object Manipulation project page / paper / code / video We present GarmentLab, a benchmark designed for garment manipulation within realistic 3D indoor scenes. Our benchmark encompasses a diverse range of garment types, robotic systems and manipulators including dexterous hands. The multitude of tasks included in the benchmark enables further exploration of the interactions between garments, deformable objects, rigid bodies, fluids, and avatars. |
|
Huawei Scholarship (School-level), Peking University, 2025 Merit Student Award, Peking University, 2025 |
 |
2025.6 - Present Research Intern Research Advisor: Shenlong Wang |
 |
2022.09 - Present Undergraduate Student Major: Computer Science (CS) |